
曹文熬,博士,博士后,副教授,博士生导师, 机械工程系副主任。入选地大学者—青年拔尖人才,入选湖北省青年科技晨光计划,加拿大拉瓦尔大学机器人实验室国家公派访问学者,获教育部自然科学二等奖。
主要从事机器人智能装备的研究工作,主讲本科生课程“机器人技术”,研究生课程“机器人技术与装备前沿”。主持国家自然科学基金面上项目、青年基金、中国博士后基金第10批特别资助和中国博士后基金第58批面上资助,武汉市知识创新专项,企业委托项目5项。在研究领域国内外顶级和著名期刊发表SCI论文20多篇,授权发明专利40余项,授权软件著作权5项,研究领域国际三大顶级期刊ASME Journal of Mechanical Design, ASME Journal of Mechanisms and Robotics, Mechanism and Machine Theory审稿人,主编学术专著1部,国家自然科学基金通信评专家。
联系方式
邮箱:cwao1986 @163.com
抖音号:aorobot (有部分可公开的研究成果介绍)
研究方向
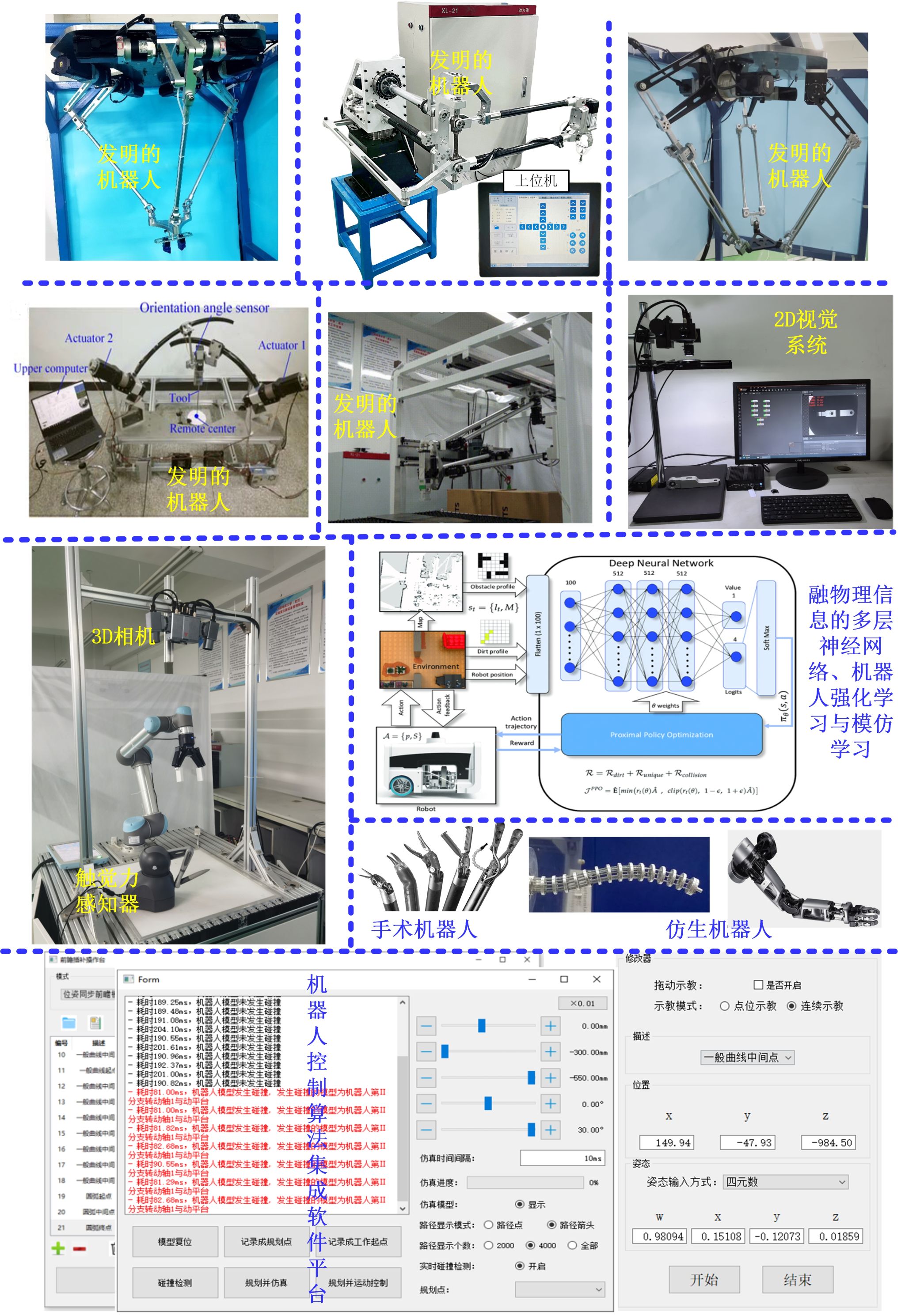
一、机器人整机系统(结构/机构+控制+视觉/深度学习,理论与应用紧密结合):
(1)机器人机电一体化控制系统,机器人运动控制算法,机器人力柔顺控制算法,轨迹平滑控制, 基于C++、Qt、C#的机器人控制系统开发。(特点:不是做纯理论控制算法,所做算法皆能落地应用,部分运动控制算法已转让给国内知名的控制器厂家)
(2)机器人2D/3D机器视觉,基于融入物理信息的多层神经网络的深度学习,机器人抓取运转动作的强化学习、模仿学习。(特点:将运动控制和视觉/深度学习高度集成,自己从底层逻辑开始建立网络算法并搭建训练模型,并非照搬现存网络)
(3)并联/混联机器人、医疗手术机器人、航空发动机检测连续体机器人、核环境探测机器人、仿人机械臂,仿生机器人、软体机器人、外骨骼机器人、变刚度机器人等的系统研制。
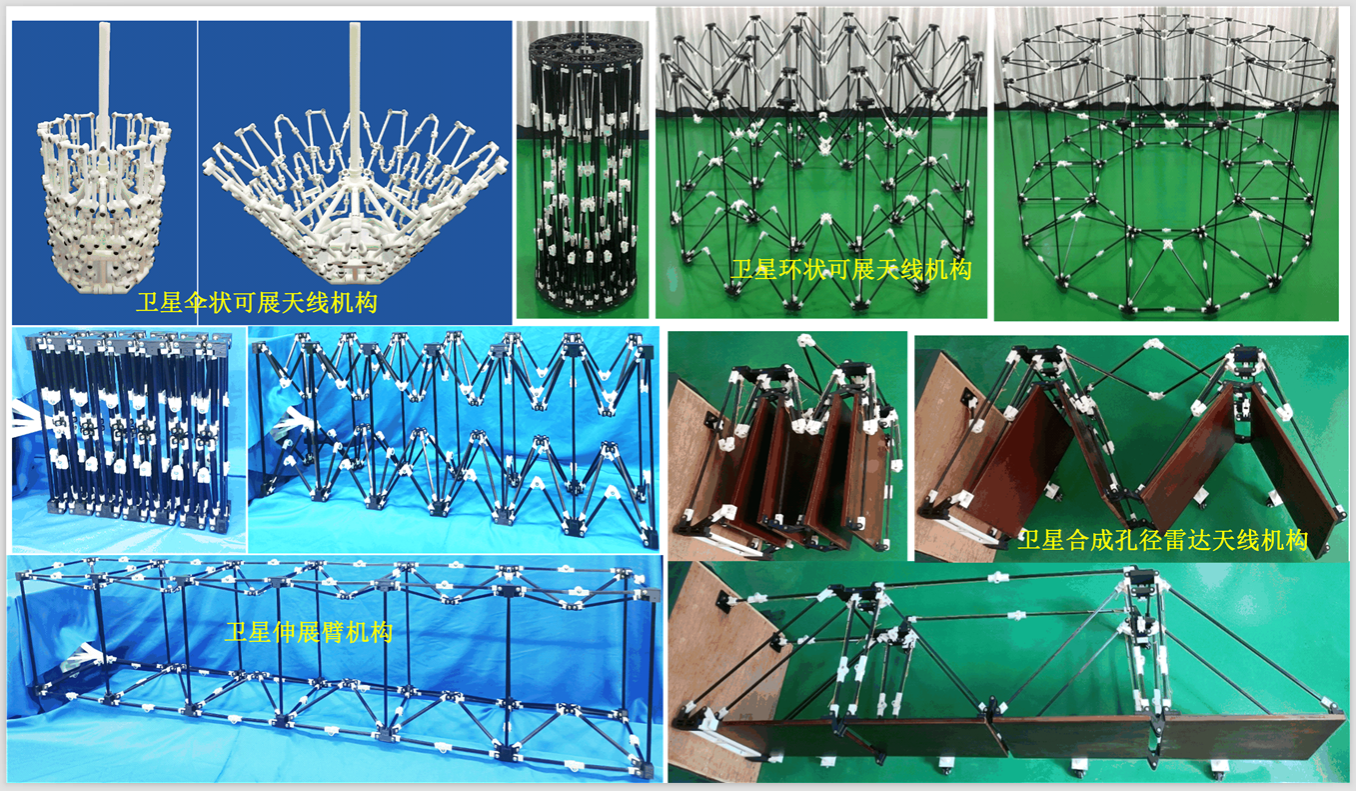
二、面向航天工程卫星大口径可折展装备设计
面向国家在航天领域重大装备需求的大型卫星可折展天线、太空伸展臂、合成孔径雷达天线等的设计与性能优化,展开动力学控制及工程应用。
课题组的在机器人方向的研究工作
课题组在航天工程方向的研究工作
院长团队机器人技术方向的总负责人,已独立研制出多种高端机器人整机系统。在地大而言,这里的机器人技术最全面、技术底蕴最深厚。课题组的特色是理论与实践结合非常好,每个学生都有丰富的实践机会,不搞空洞的纯理论研究。(欢迎新生多向在读学生打听导师的品质与学术能力)
每年招收博士生1人,硕士生4人。欢迎勤奋踏实、对机器人智能自动化技术感兴趣的学生加入课题组。研究生课题主要集中在机器人智能自动化系统设计(包含机器人设计制作,控制系统软硬件开发,先进控制算法,机器视觉,深度学习,智能感知与柔顺控制,机器人手眼协同智能抓取、分拣、操作等)。可到抖音号(aorobot)了解部分可公开的研究成果展示。
学生就业去向:就业很热门,就业口径宽。既能掌握前沿的机器人技术理论,又有丰富的实操锻炼,每届毕业生就业都很好。已毕业学生都去了高新技术企业和科研院所,或继续深造读博。
与加拿大不列颠哥伦比亚大学(UBC),加拿大拉瓦尔大学,德国杜伊斯堡-埃森大学、加拿大多伦多大学等保持密切学术交流。可推荐优秀学生继续攻读博士学位或赴国外交流。
指导本科生:
蔡彦璞:新型五轴串并联机床运动学及曲面加工仿真.2016, 湖北省优秀学士论文
王泽宇:3-PRRU并联主轴头运动学反解分析与结构设计.2018,永利集团88304官网在线登录(武汉)优秀学士论文.
魏彦峰:基于平面5R含复铰机构的写字机器人设计与研究.2019,永利集团88304官网在线登录(武汉)优秀学士论文.
张青:基于ROS的UR协作机器人的平滑轨迹规划. 2022,永利集团88304官网在线登录(武汉)优秀学士论文.
来敬沛:六自由度机器人速度前瞻轨迹平滑控制算法.2023,永利集团88304官网在线登录(武汉)优秀学士论文.
指导研究生(目前在读14人,协助指导博士生2人,每年招收博士生1人,硕士生4人):
杨栋皓,航天可折展天线构型创新设计与性能分析,获研究生国家奖学金, 2019年永利集团88304官网在线登录(武汉)优秀硕士论文。
已发表论文 :
[1] Cao Wen-ao, Cheng Peng, Design and kinematic analysis of a novel deployable antenna mechanism for synthetic aperture radar satellites, ASME Journal of Mechanical Design, 2022, 144(11): 114502(SCI, 研究领域顶级期刊)
[2] Zhaoran Meng, Cao Wen-ao*, Huafeng Ding. A new six degree-of-freedom parallel robot with three limbs for high-speed operations, Mechanism and Machine Theory, 2022, 173: 104875(SCI, 研究领域顶级期刊)
[3] Cao Wen-ao, Sheng Xi, Ding Huafeng. Design and kinematics of a novel double-ring truss deployable antenna mechanism, ASME Journal of Mechanical Design, 2021, 143:124502 (SCI, 研究领域顶级期刊)
[4] Peng Cheng, Huafeng Ding, Cao Wen-ao*, Clément Gosselin, Mingchao Geng. A novel family of umbrella-shaped deployable mechanisms constructed by multi-layer and multi-loop spatial linkage units. Mechanism and Machine Theory, 2021,169: 104169. (SCI, 研究领域顶级期刊)
[5] Cao Wen-ao, Jing Ziqing, Ding Huafeng. A general method for kinematics analysis of two-layer and two-loop deployable linkages with coupling chains. Mechanism and Machine Theory, 2020. 152:103945 (SCI, 研究领域顶级期刊)
[6] Cao Wen-ao, Zhang De, Ding Huafeng. A novel two-layer and two-loop deployable linkage with accurate vertical straight-line motion, ASME Journal of Mechanical Design, 2020, 142(10): 103301 (SCI, 研究领域顶级期刊)
[7] Cao Wen-ao, Xu Shi-jie, Rao Kun, Ding Tengfei. Kinematic design of a novel two degree-of-freedom parallel mechanism for minimally invasive surgery. ASME Journal of Mechanical Design, 2019, 141(10): 104501(SCI, 研究领域顶级期刊)
[8] Cao Wen-ao, Ding Huafeng, Zhu Weiguo. Stiffness modeling of overconstrained parallel mechanisms under considering gravity and external payloads. Mechanism and Machine Theory, 2019,135: 1-16 (SCI, 研究领域顶级期刊)
[9] Cao Wen-ao, Yang Donghao, Ding Huafeng. Topological structural design of umbrella-shaped deployable mechanisms based on new spatial closed-loop linkage units. ASME Journal of Mechanical Design, 2018, 140(6): 062302. (SCI, 研究领域顶级期刊)
[10] Cao Wen-ao, Yang Donghao, Ding Huafeng. A New Family of Deployable Mechanisms Derived From Two-Layer and Two-Loop Spatial Linkages With Five Revolute Pair Coupling Chains. ASME Journal of Mechanisms and Robotics, 2017,9(6): 061016. (SCI, 研究领域顶级期刊)
[11] Cao Wen-ao, Ding Huafeng, Yang Donghao. A method for compliance modeling of five degree-of- freedom overconstrained parallel robotic mechanisms with 3T2R output motion. ASME Journal of Mechanisms and Robotics, 2017, 9(1):011011. (SCI, 研究领域顶级期刊)
[12] Cao Wen-ao, Ding Huafeng. A method for solving all joint reactions of 3R2T parallel mechanisms with complicated structures and multiple redundant constraints. Mechanism and machine Theory, 2018, 121:718-730 (SCI, 研究领域顶级期刊)
[13] Cao Wen-ao, Yang Donghao, Ding Huafeng. A method for stiffness analysis of overconstrained parallel robotic mechanisms with Scara motion. Robotics and Computer-Integrated Manufacturing, 2018,49:426-35. (SCI,研究领域著名期刊)
[14] Cao Wen-ao, Ding Huafeng. A method for stiffness modeling of 3R2T overconstrained parallel robotic mechanisms based on screw theory and strain energy. Precision Engineering, 2018, 51:10-29. (SCI,研究领域著名期刊)
[15] Cao Wen-ao, Ding Hufeng, Chen Ziming, Zhao Shipei. Mobility analysis and structural synthesis of a class of spatial mechanisms with coupling chains. Robotica, 2016, 34: 2467-85. (SCI,研究领域著名期刊)
[16] Cao Wen-ao, Ding Huafeng, Chen Ziming, Ziming.New Structural Representation and Digital-Analysis Platform for Symmetrical Parallel Mechanisms. International Journal of Advanced Robotoc Systems, 2013,10:1-10. (SCI,研究领域著名期刊)
[17] Ding Huafeng, Cao Wen-ao, Cai Changwang, Kecskemethy, A.. Computer-Aided Structural Synthesis of 5-Dof Parallel Mechanisms and the Establishment of Kinematic Structure Databases. Mechanism and Machine Theory, 2015, 83: 14-30. (SCI, 研究领域顶级期刊)
[18] Ding Huafeng, Cao Wen-ao, Andrs Kecskeméthy, Huang Zhen. Complete Atlas Database of 2-DOF Kinematic Chains and Creative Design of Mechanisms. ASME Journal of Mechanical Design, 2012, 134(3): 31006. (SCI, 研究领域顶级期刊)
[19] Ding Huafeng, Cao wen-ao, Chen Ziming, Kecskemethy, A. Structural Synthesis of Two-Layer and Two-Loop Spatial Mechanisms with Coupling Chains. Mechanism and Machine Theory, 2015, 92: 289-313. (SCI, 研究领域顶级期刊)
[20] Chen Ziming; Cao, Wen-ao; Ding, Huafeng; Huang, Zhen. Continuous motion of a novel 3-CRC symmetrical parallel mechanism. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2016, 230(3): 392-405. (SCI,研究领域著名期刊)
[21] 曹文熬, 丁华锋, 陈子明, 黄真. 两层两环空间耦合链机构自由度分析原理. 机械工程学报, 2016:116-26. (EI)
[22] 杨栋皓, 曹文熬*,丁华锋. 基于新型两层两环连杆的一族伞状可展机构的构型综合, 机械工程学报, 2019 (EI)
[23] Chen, Ziming; Cao, Wen-ao; Huang, Zhen. Kinematics analysis of a new 3-DOF rotational parallel mechanism. Proceedings of the ASME Design Engineering Technical Conference, 2012, pp: 573-578. (EI)
[24] Chen, Ziming; Cao, Wen-ao; Huang, Zhen. Type synthesis of 3-DOF rotational parallel mechanisms with no intersecting axes. Proceedings of the ASME Design Engineering Technical Conference, 2012, pp:565-572. (EI)
[25] Chen, Ziming; Ding, Huafeng; Cao, Wen-ao; Huang, Zhen. Axodes analysis of the multi DOF parallel mechanisms and parasitic motion. Proceedings of the ASME Design Engineering Technical Conference , 2013, IDETC/CIE. (EI)
[26] 陈子明, 黄真, 曹文熬. 空间少自由度并联机构瞬时螺旋运动轴线曲面的几何表示方法. 燕山大学学报, 2012, 36(2): 113-118
科研项目
1. 国家自然科学基金面上项目 (No. 51875538),2019.01-2022.12,60万,主持。
2. 国家自然科学基金青年基金(No.51505438), 2016.01-2018.12,21万,主持。
3. 中国博士后基金第10批博士后特别资助项目(No.2017T100590),2017.09-2019.12,15万,主持。
4. 武汉市知识创新专项,2022.06-2024.12,20万,主持。
5. 企业委托,多轴机器人高精度运动控制算法开发,2023.10-2025.10, 50万,主持。
6. 企业委托,刚柔耦合多自由度手术机器人研制,2022.10-2024.12,58万,主持。
7. 企业委托,大型装配生产线自动化改造方案设计,2022.05-2023.12,22.5万,主持。
8. 中国地质大学大学生领航计划:面向3C装配的高速高精度六自由度并联机器人研制,2022.05-2024.12,10万,指导老师。
9. 企业委托,面向隧道探测的全方位自动定位装置研制,2021.12-2023.12,主持。
10. 湖北省青年科技晨光计划, 2019.12-2021.6,主持。
11. 中国博士后基金第58批博士后科学基金面上项目 (No. 2015M582302), 2016.01-2018.12,主持。
12. 江苏省先进制造技术重点实验室开放基金 (HGAMTL-1604). 2016.12-2018.12,主持。
13. 中央高校中基本科研业务新青年基金(CUG160825). 2016.01-2017.12,主持。
14. 全方位自动测量装置开发,企业委托,2021.11-2022.06,主持
获奖情况
2022年教育部自然科学二等奖
2019年校优秀学士论文指导教师
2019年校优秀硕士论文指导教师
2018年校优秀学士论文指导教师
2022年校优秀学士论文指导教师
2023年校优秀学士论文指导教师
2022年校优秀实习指导教师
2019年学院优秀党员
2021年学院优秀党务工作者
2022年学院优秀党员
2017年永利集团88304官网在线登录(武汉)校优秀班主任
2017年校知识产权保护与技术转移先进个人
2017年省优秀学士论文指导教师
2014年博士研究生国家奖学金
2012年博士研究生国家奖学金
部分发明专利 (以第1发明人申报发明专利30余项)
[1] 曹文熬,徐世杰,饶坤.一种具有高偏转能力的微创手术机器人,发明专利,专利号:201711450659.7.授权日期:2020/05/01
[2] 曹文熬,丁华锋,等. 一种三自由度重载平动搬运机器人机构. 发明专利, 专利号: ZL201510856198.8, 授权日期:2017/02/01
[3] 曹文熬, 丁华锋,等 一种平动与转动解耦的六自由度重载机器人机构. 发明专利,专利号:ZL201510853375.7, 授权日期:2017/02/01
[4] 曹文熬,丁华锋,等. 一种六自由度重载调平机器人机构. 发明专利, 专利号: ZL201510853381.2, 授权日期:2017/05/10
[5] 曹文熬,等. 一种五轴联动串并联机床,发明专利, 专利号: ZL201610514751.4, 授权日期:2018/05/10
[6] 曹文熬,等. 一种六自由度串并联装配机器人,发明专利, 专利号:ZL201710865007.3,授权日期:2019/12/17
[7] 曹文熬,等一种含耦合支链的闭环连杆单元及基于此的伞状可展机构, 发明专利, 专利号:ZL201710114228.7, 授权日期:2019/12/17